
[포토] 사람 손과 비슷한 움직임 로봇 손 개발
김태이 기자
수정 2020-01-22 10:59
입력 2020-01-22 10:59
/
5
-
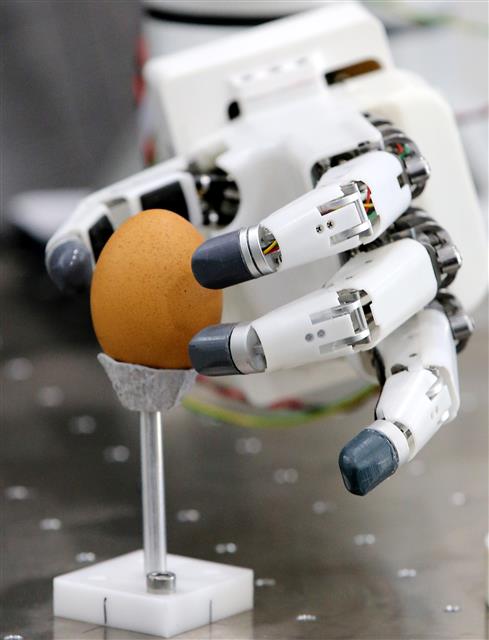
한국기계연구원, 인간형 로봇 손 개발21일 오전 대전 유성구 한국기계연구원 연구동에서 도현민 책임연구원과 연구원들이 촉각센서 일체형 로봇 손 개발 연구성과 시연회를 갖고 있다. 이번에 개발된 인간형 로봇 손은 4개의 손가락과 16개의 관절로 이루어졌으며 각 방향으로 움직일 수 있도록 12개의 모터가 사용됐다. 도현민 책임연구원은 사람의 손의 섬세한 움직임을 모방해 일상생활에서 사용하는 도구 등 다양한 물체를 다루기 위해 로봇 손을 개발했다고 밝혔다. 2020.1.22
뉴스1 -
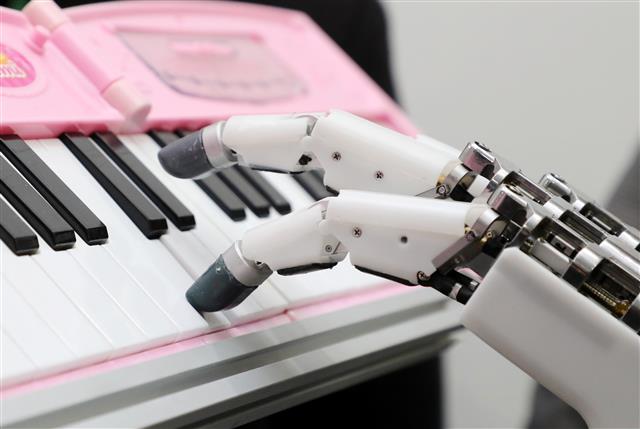
도구 조작 가능한 인간형 로봇 손 개발21일 오전 대전 유성구 한국기계연구원 연구동에서 도현민 책임연구원과 연구원들이 촉각센서 일체형 로봇 손 개발 연구성과 시연회를 갖고 있다. 이번에 개발된 인간형 로봇 손은 4개의 손가락과 16개의 관절로 이루어졌으며 각 방향으로 움직일 수 있도록 12개의 모터가 사용됐다. 도현민 책임연구원은 사람의 손의 섬세한 움직임을 모방해 일상생활에서 사용하는 도구 등 다양한 물체를 다루기 위해 로봇 손을 개발했다고 밝혔다. 2020.1.22.
뉴스1 -

사람 움직임 모사한 인간형 로봇 손 개발21일 오전 대전 유성구 한국기계연구원 연구동에서 도현민 책임연구원과 연구원들이 촉각센서 일체형 로봇 손 개발 연구성과 시연회를 갖고 있다. 이번에 개발된 인간형 로봇 손은 4개의 손가락과 16개의 관절로 이루어졌으며 각 방향으로 움직일 수 있도록 12개의 모터가 사용됐다. 도현민 책임연구원은 사람의 손의 섬세한 움직임을 모방해 일상생활에서 사용하는 도구 등 다양한 물체를 다루기 위해 로봇 손을 개발했다고 밝혔다. 2020.1.22
뉴스1 -

인간형 로봇 손, 일상생활 활용 기대21일 오전 대전 유성구 한국기계연구원 연구동에서 도현민 책임연구원과 연구원들이 촉각센서 일체형 로봇 손 개발 연구성과 시연회를 갖고 있다. 이번에 개발된 인간형 로봇 손은 4개의 손가락과 16개의 관절로 이루어졌으며 각 방향으로 움직일 수 있도록 12개의 모터가 사용됐다. 도현민 책임연구원은 사람의 손의 섬세한 움직임을 모방해 일상생활에서 사용하는 도구 등 다양한 물체를 다루기 위해 로봇 손을 개발했다고 밝혔다. 2020.1.22
뉴스1 -

물체 조작 가능한 인간형 로봇 손 개발21일 오전 대전 유성구 한국기계연구원 연구동에서 도현민 책임연구원과 연구원들이 촉각센서 일체형 로봇 손 개발 연구성과 시연회를 갖고 있다. 이번에 개발된 인간형 로봇 손은 4개의 손가락과 16개의 관절로 이루어졌으며 각 방향으로 움직일 수 있도록 12개의 모터가 사용됐다. 도현민 책임연구원은 사람의 손의 섬세한 움직임을 모방해 일상생활에서 사용하는 도구 등 다양한 물체를 다루기 위해 로봇 손을 개발했다고 밝혔다. 2020.1.22
뉴스1
21일 오전 대전 유성구 한국기계연구원 연구동에서 도현민 책임연구원과 연구원들이 촉각센서 일체형 로봇 손 개발 연구성과 시연회를 갖고 있다. 이번에 개발된 인간형 로봇 손은 4개의 손가락과 16개의 관절로 이루어졌으며 각 방향으로 움직일 수 있도록 12개의 모터가 사용됐다. 도현민 책임연구원은 사람의 손의 섬세한 움직임을 모방해 일상생활에서 사용하는 도구 등 다양한 물체를 다루기 위해 로봇 손을 개발했다고 밝혔다.
뉴스1
Copyright ⓒ 서울신문 All rights reserved. 무단 전재-재배포, AI 학습 및 활용 금지


![THE NEXT : AI 운명 알고리즘 지금, 당신의 운명을 확인하세요 [운세 확인하기]](https://imgmo.seoul.co.kr/img/n24/banner/ban_ai_fortune_v2.png)




































































